Arithmetic Mean filter:
It is the simplest mean filter. Let Sxy represents the set of coordinates in the sub image of size m*n centered at point (x,y). The arithmetic mean filter computes the average value of the corrupted image g(x,y) in the area defined by Sxy. The value of the restored image f at any point (x,y) is the arithmetic mean computed using the pixels in the region defined by Sxy

This operation can be using a convolution mask in which all coefficients have value 1/mm A mean filter soothes local variations in image Noise is reduced as a result of blurring. For every pixel in the image, the pixel value is replaced by the mean value of its neighboring pixels with a weight. This will be resulted in a smoothing effect in the image
Geometric Mean Filter:
An image restored using a geometric mean filter is given by the expression
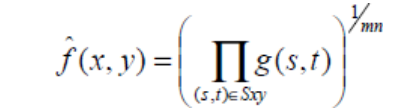
Here, each restored pixel is given by the product of the pixel in the sub image window, raised to the power 1/mm. A geometric mean filter but it to loosen image details in the process.
Harmonic Mean Filter:
The harmonic mean filtering operation is given by the expression
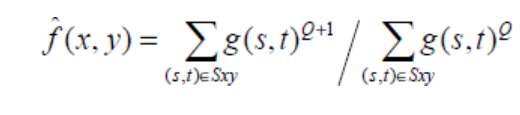
The harmonic mean filter works well for salt noise but fails for pepper noise. It does well with Gaussian noise also
Order Statistics Filter
Order statistics filters are spatial filters whose response is based on ordering the pixel contained in the image area encompassed by the filter.
The response of the filter at any point is determined by the ranking result
Median filter:
It is the best order statistic filter; it replaces the value of a pixel by the median of gray levels in the Neighborhood of the pixel.The original of the pixel is included in the computation of the median of the filter are quite possible because for certain types of random noise, the provide excellent noise reduction capabilities with considerably less blurring then smoothing filters of similar size. These are effective for bipolar and unipolar impulse noise.
Max and Min Filter:
Using the l00th percentile of ranked set of numbers is called the max filter and is given by the equation. It is used for finding the brightest point in an image. Pepper noise in the image has very low values, it is reduced by max filter using the max selection process in the sublimated area sky. The 0th percentile filter is
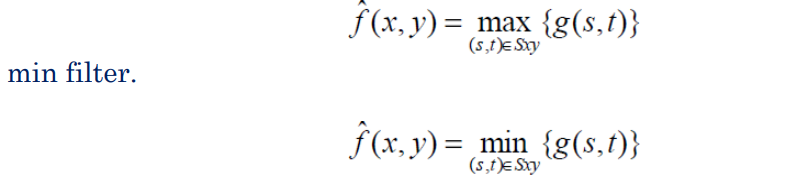
This filter is useful for flinging the darkest point in image. Also, it reduces salt noise of the min operation
Midpoint Filter:
The midpoint filter simply computes the midpoint between the maximum and minimum values in the area encompassed by its comeliness the order statistics and averaging. This filter works best for randomly distributed noise like Gaussian or uniform noise

Periodic Noise by Frequency Domain Filtering:
These types of filters are used for this purpose
Band Reject Filters:It removes a band of frequencies about the origin of the Fourier transformer.
Ideal Band reject Filter:An ideal band reject filter is given by the expression
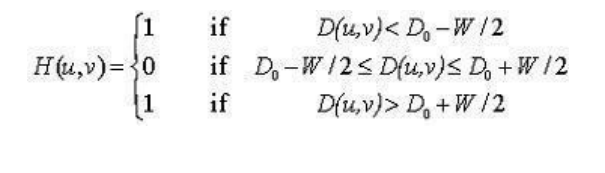
D(u,v)- the distance from the origin of the centered frequency rectangle, W-the width of the band and Do- the radial center of the frequency rectangle
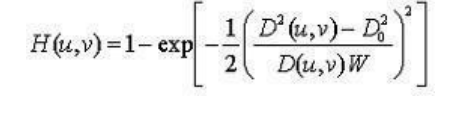
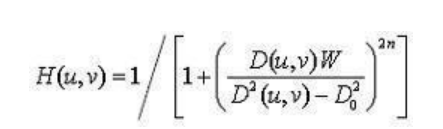
Butterworth Band Reject Filter:
Gaussian Band Reject Filter: